自动驾驶
项目简介:自动驾驶组以可视分析自动驾驶数据、理解自动驾驶场景和系统为主,主要涉及到的数据包括仿真场景和系统内部各个模块的数据等。项目包括:自动驾驶规划行为可视分析(可视化规划内部流程和数据以及用一套评分系统分析和评估规划结果)、自动驾驶场景图的时空可视分析(结合图可视分析技术和图算法进行交互式的探索、分析、对比、归纳、总结不同的自动驾驶场景,提升自动驾驶的场景理解)、可解释的自动驾驶数据流可视化(通过可视化各模块间数据流来呈现系统决策流程,用特定场景的信息形成自动驾驶的数据故事)。
Project Introduction: The Autonomous Driving Group
primarily focuses on visual analytics of autonomous driving data, understanding
autonomous driving scenarios and systems. The data involved includes simulation
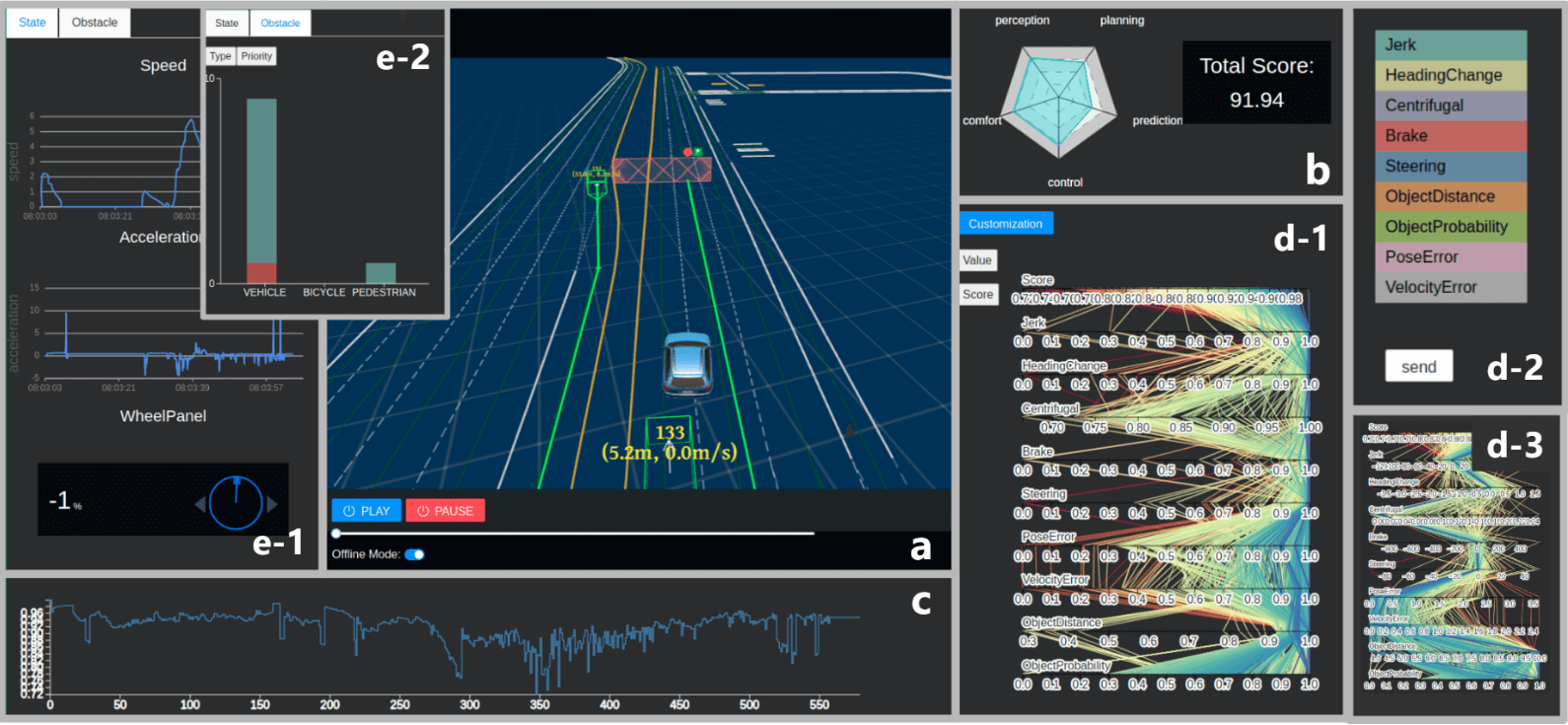
scenarios and data from various modules within the system. The project includes:
Visual Evaluation for Autonomous Driving Planning (visualizing the internal
processes and data of planning module, and evaluating planning results using a
scoring system),
Spatio-temporal Visual Analytics of Autonomous Driving Scene Graph (using
interactive exploration, analysis, comparison, induction, and summary of different
autonomous driving scenarios, combining visual analysis technology and graph
algorithms to improve the understanding of autonomous driving scenes)
Explainable Visualization of Data Flow in Autonomous Driving (presenting the system
decision-making process by visualizing the data flow between modules, forming a data
story for autonomous driving using information from specific scenarios)
相关发表
Visual Computing for Autonomous Driving. (Guest Editors' Introduction)
Siming Chen, Liang Gou, Michael Kamp, Dong Sun.
IEEE Computer Graphics and Applications (CG&A), 44:11-13 2024, Accepted.
Siming Chen, Liang Gou, Michael Kamp, Dong Sun.
IEEE Computer Graphics and Applications (CG&A), 44:11-13 2024, Accepted.
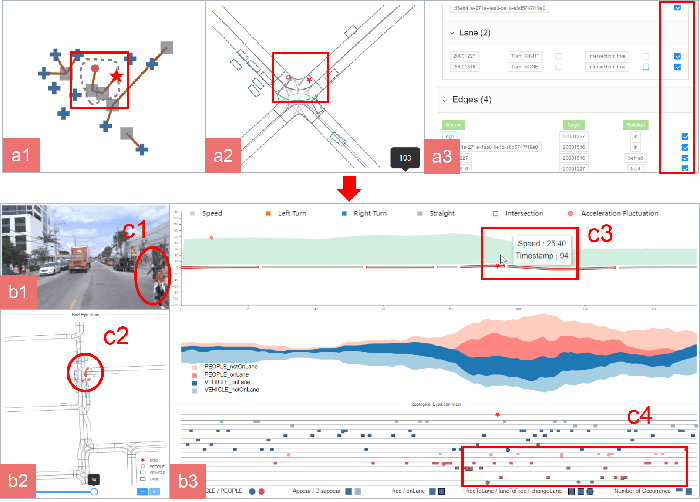
Dynamic-Scene-Graph-Supported Visual Understanding of Autonomous Driving Scenarios.
Ting Liu, Dong Sun, Chongke Bi, Yi Sun, Siming Chen*.
In Proceedings of IEEE Pacific Visualization Conference (PacificVis 2024), pages 82-91, Tokyo, Japan, 2024.
Ting Liu, Dong Sun, Chongke Bi, Yi Sun, Siming Chen*.
In Proceedings of IEEE Pacific Visualization Conference (PacificVis 2024), pages 82-91, Tokyo, Japan, 2024.
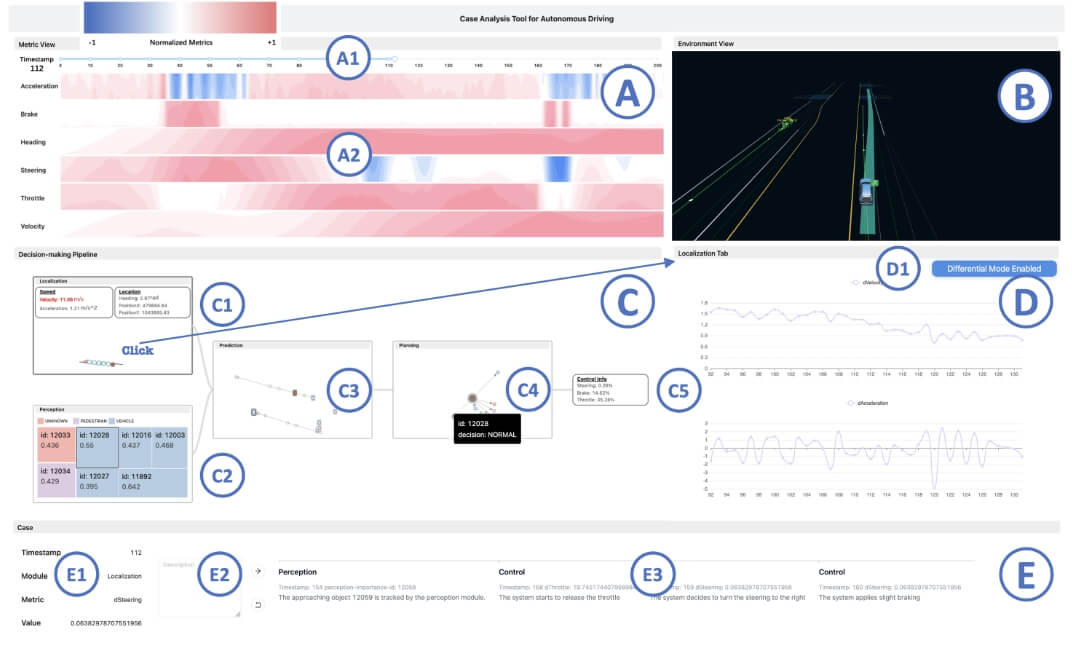
Interpreting Autonomous Driving Corner Cases: A Visual Analytics Approach.
Yi Sun, Zekai Shao, Xingyu Qiu, Yun Li, Ting Liu, Linbing Xiang, Dong Sun, Siming Chen*.
In Proceedings of IEEE Pacific Visualization Conference (PacificVis 2024), pages 92-101, Tokyo, Japan, 2024.
Yi Sun, Zekai Shao, Xingyu Qiu, Yun Li, Ting Liu, Linbing Xiang, Dong Sun, Siming Chen*.
In Proceedings of IEEE Pacific Visualization Conference (PacificVis 2024), pages 92-101, Tokyo, Japan, 2024.
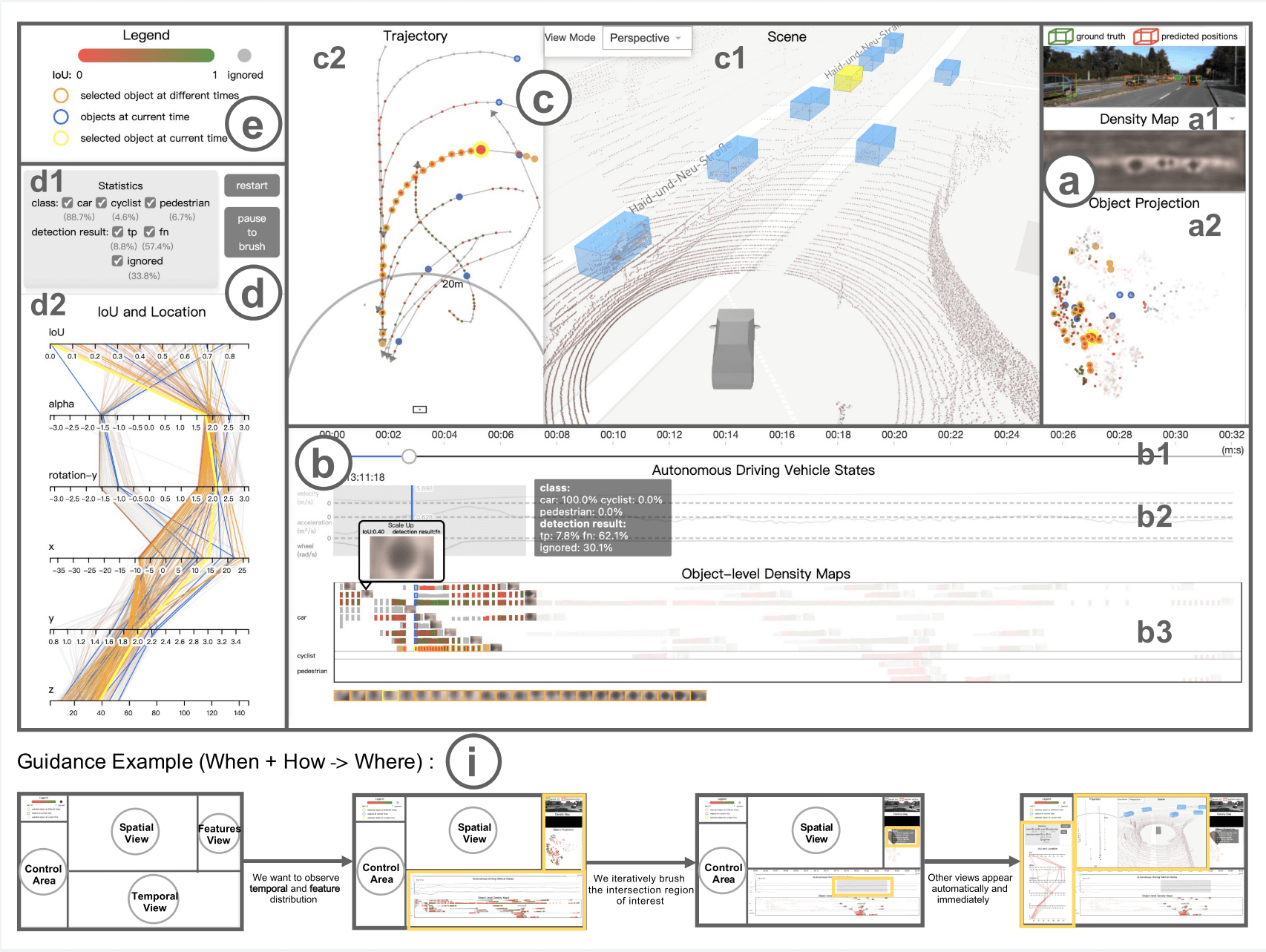
When, Where and How does it fail? A Spatial-temporal Visual Analytics Approach for Interpretable Object Detection in Autonomous Driving.
Junhong Wang, Yun Li, Zhaoyu Zhou, Chengshun Wang, Yijie Hou, Li Zhang, Xiangyang Xue, Michael Kamp, Xiaolong (Luke) Zhang, Siming Chen*.
IEEE Transactions on Visualization and Computer Graphics, Accepted, 2022.
| Paper | pdf (11.9MB) | Video | mp4 (35.6MB)
Junhong Wang, Yun Li, Zhaoyu Zhou, Chengshun Wang, Yijie Hou, Li Zhang, Xiangyang Xue, Michael Kamp, Xiaolong (Luke) Zhang, Siming Chen*.
IEEE Transactions on Visualization and Computer Graphics, Accepted, 2022.
| Paper | pdf (11.9MB) | Video | mp4 (35.6MB)
Visual Evaluation for Autonomous Driving.
Yijie Hou, Chengshun Wang, Junhong Wang, Xiangyang Xue, Xiaolong (Luke) Zhang, Jun Zhu, Dongliang Wang, Siming Chen*.
IEEE Transactions on Visualization and Computer Graphics (VIS'21), Accepted, 2022.
| Paper | pdf (15.4MB) | Video | mp4 (58.6MB)
Yijie Hou, Chengshun Wang, Junhong Wang, Xiangyang Xue, Xiaolong (Luke) Zhang, Jun Zhu, Dongliang Wang, Siming Chen*.
IEEE Transactions on Visualization and Computer Graphics (VIS'21), Accepted, 2022.
| Paper | pdf (15.4MB) | Video | mp4 (58.6MB)
- © FDU-VIS All rights reserved. 2025